
Ya hemos descrito en el artículo Placa para control de motores de dónde sacar motores y de cómo funciona a grandes rasgos un puente H. Ahora vamos a simplificar un poco las cosas con una placa controladora de motores paso a paso basada en los populares chips L297 y L298.
Los chips que vamos a usar para esta placa son:
- L297: Controlador de motores paso a paso, el cual carece de la parte de potencia, es decir, de los puentes H de salida.
- L298: Son dos puentes H completos, necesarios para excitar un motor paso a paso bipolar. Es como un L293 pero maneja mucha más potencia.
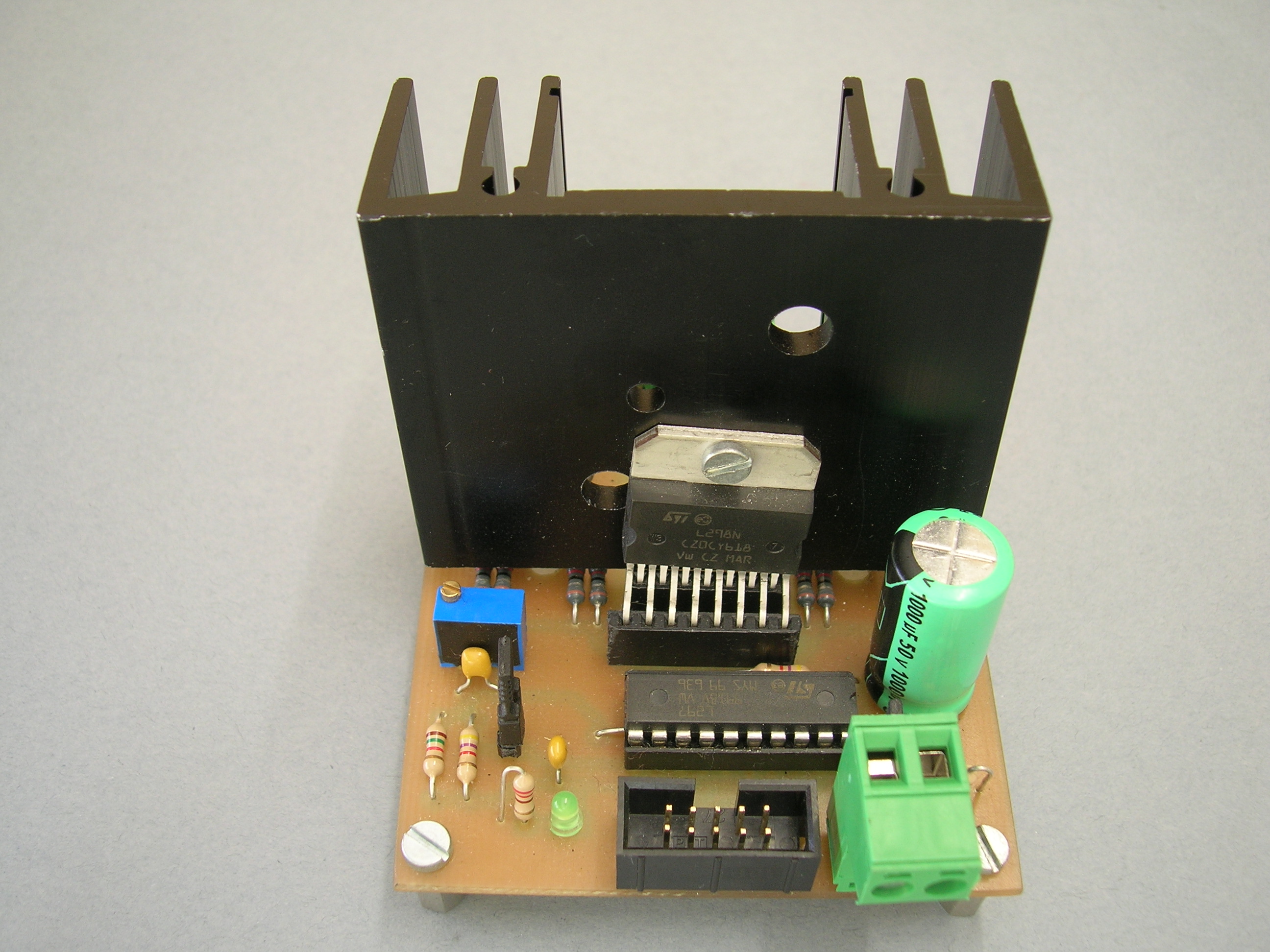
Foto 1: Placa terminada
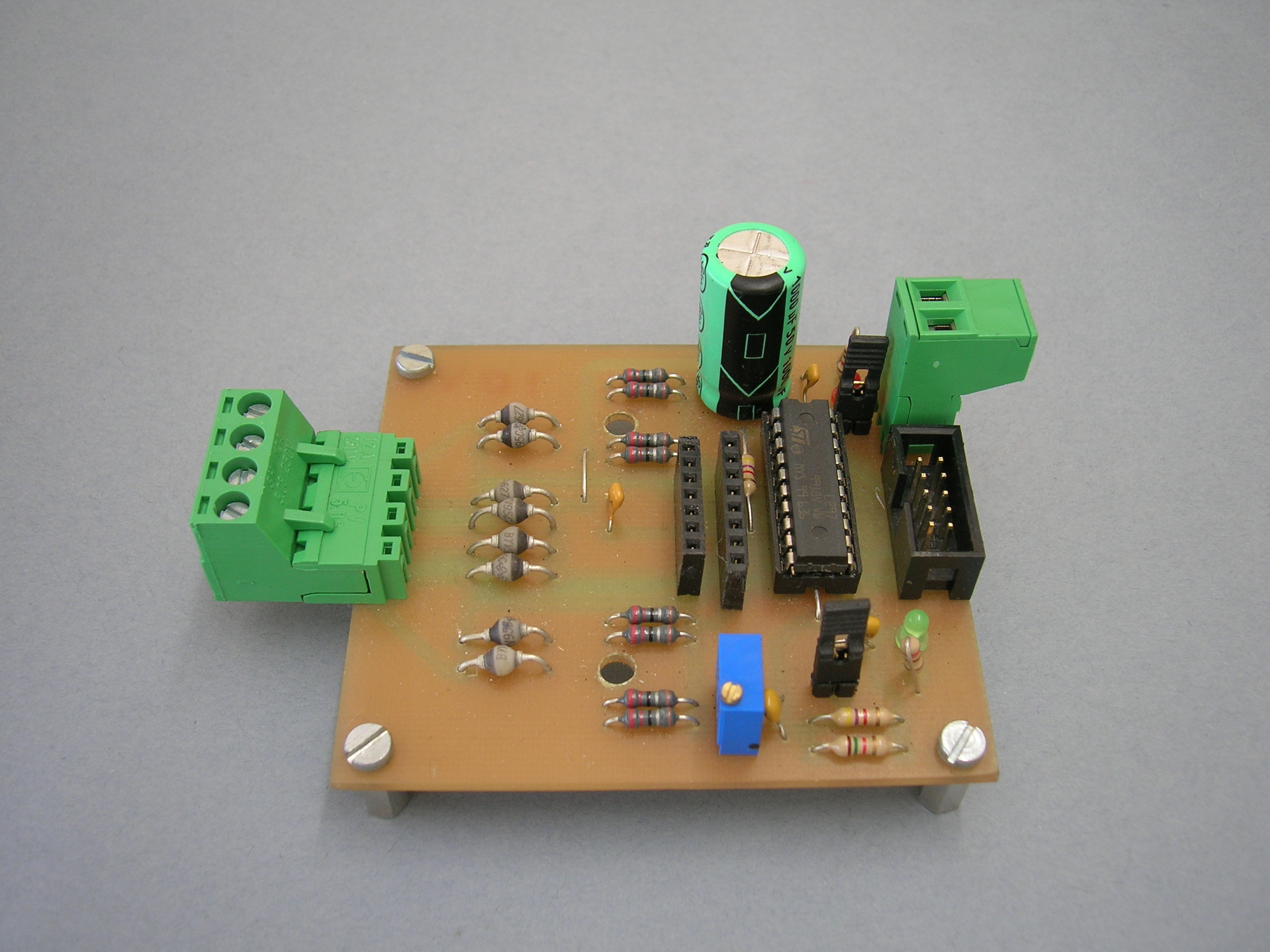
Foto 2: Placa terminada sin radiador
Cuál es la idea de esta placa
La placa está pensada únicamente para controlar motores paso a paso bipolares. Fue creada para el proyecto de maquina CNC, aunque posteriormente se tuvieron que poner motores más potentes y se optó por un driver comercial con más opciones como microstepping, inicialmente los primeros pasos de esa máquina fueron dados con motores sacados de impresoras viejas y estos drivers.
La idea de esta placa fue desde un principio simplificar el movimiento de un motor paso a paso. Generar la secuencia de movimiento paso a paso tiene un bonito fin didáctico, pero siendo sensatos es poco práctico estar calculando la secuencia y manteniendo el estado del motor etc, supone un uso absurdo de memoria y recursos del microcontrolador, además de complicar enormemente el código. Esta placa nos permite mover un motor PAP simplemente marcando sentido de giro (CW / CCW) y dando pulsos de avance, lo que permite liberar de cálculo al microcontrolador.
El cambio de modo paso completo a medio paso se realizara simplemente con el cambio de un jumper. Como está pensada para controlar una máquina, no queremos en tiempo de ejecución cambiar las características de la maquina ya que complicaría demasiado el sistema. De ahí que el jumper nos da la versatilidad de los dos modos, pero en una configuración se trabajará solo en uno y no se cambiara a lo largo de gran parte de la vida del proyecto.
Dispone de un sistema de sensado de la corriente suministrada al motor, además se le conectó un potenciómetro que fija y limita la corriente suministrada y por tanto podemos limitar la potencia del motor. Esta regulación se hace mediante un PWM en corriente, es decir al alcanzar un consumo de corriente determinado esta cae hasta que se recibe otro pulso de avance.
Como vemos, de entrada, conseguiremos un sistema de mover un motor paso a paso mucho más sencillo que con el L293 únicamente.
Describamos un poco la placa
La placa está dotada de un conector de alimentación externo ya que hay motores que consumen más corriente en algunos instantes, y este consumo excesivo puede causar un reset del microcontrolador debido a una caída de tensión. Además, algunos motores PAP necesitan tensiones elevadas para funcionar correctamente. Por estos motivos se optó por una alimentación externa y no desde la placa, como de costumbre.
El conector de control habitual de las placas (IDC-10: 2x5 cable plano), tiene el siguiente pin out:
| Pin | Función |
|---|---|
| 1 | GND |
| 2 | RST (reset del driver) |
| 3 | Sync |
| 4 | CLK (avance) |
| 5 | CW/CCW (dirección) |
| 6 | OSC |
| 7 | NC (no conectado) |
| 8 | NC (no conectado) |
| 9 | Enable (deshabilita motor) |
| 10 | $V_{cc}$ |
Esta placa está pensada para montar varias iguales y tener movimiento coordinado entre los motores. Por este motivo están disponibles las señales OSC y Sync.
La señal OSC se trata de la entrada de un oscilador RC que determina la frecuencia de conmutación para el control de potencia. Este oscilador consta de una resistencia de $22 k\Omega$ y un condensador de $3.3 nF$ conectados en serie. El extremo de la resistencia libre estará conectado a tensión y el del condensador a tierra, conectando el punto intermedio, es decir la unión de resistencia y condensador, a esta patilla.
La señal Sync se trata de la salida de la señal OSC. Esto sirve para propagar la señal de OSC a otros drivers y así sincronizarlos. En caso de recibir la señal de otro driver se deberá conectar la señal de OSC a tierra para propagarla a otros puentes y así estar todos sincronizados.
En la placa se encuentran dos jumpers: con ellos se pueden seleccionar dar medios pasos o pasos completos con el motor y el tipo de control que se desea hacer con del PWM de corriente del motor, ya sea por fase del motor o por rama entera del puente.
Para más información consultar los datasheets al final del artículo.
En esta ocasión usamos diodos de recuperación rápida (BYV95C). El motivo es que si se desea hacer girar el motor a altas velocidades, la velocidad de descarga de la bobina a trabes del diodo debe ser lo más rápida posible.
Documentos
- Escrito por Lemac
- Creado: 14 Enero 2014